Фильтры с бесконечной импульсной характеристикой
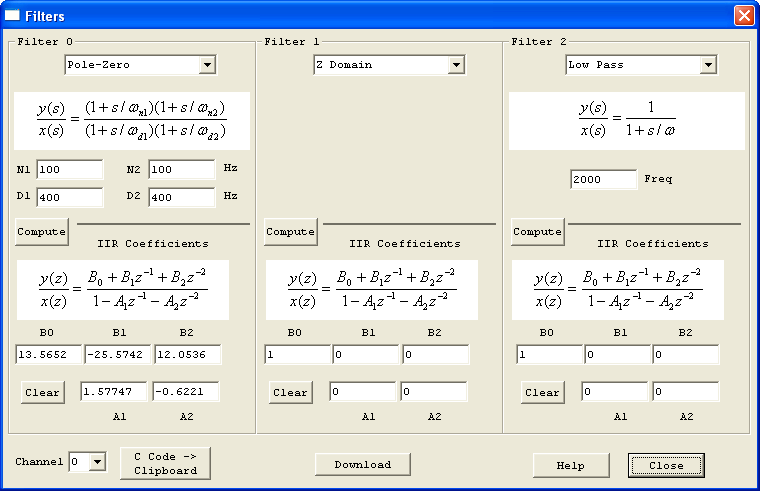
Окно настройки фильтров с бесконечной импульсной характеристикой (IIR Filter Screen) позволяет добавить фильтры в контур управления. KMotion позволяет использовать до 3 фильтров на один каскад. Для понимания расположения фильтров в алгоритме управления осью смотрите раздел Алгоритм работы управления приводами . Фильтр 0 и 1 работают с сигналом до ввода упреждения. Фильтр 2 после учета упреждения (Feed Forward).
KMotion реализует фильтры с использованием Z-коэффициентов показанных в нижней половине экрана. Из-за путаницы имен и знаков коэффициентов для справки показаны формулы передаточных функций.
Обратите внимание, что установка B0=1.0 и всех остальных коэффицентов в 0 отключает работу фильтра. Кнопка Clear устанавливает данные параметры.
В верхней части каждого фильтра можно выбрать необходимый тип фильтра из выпадающего списка. Поддерживаемые типы: фильтр низких частот 1-го порядка, фильтр низких частот 2-го порядка, режекторный фильтр, и Pole-Zero. Z-domain показывает, что параметры были рассчитаны другими, сторонними средствами. формула каждого типа фильтра приведена ниже.
После выбора типа фильтра и определения его параметров необходимо нажать кнопку Compute для получения Z-коэффицентов с учетом частоты работы функции фильтров.
Обратите внимание, что KMotion всегда использует текущие (вычисленные самыми последними или введенными) коэффициенты Z-домена, независимо от каких-либо изменений, которые могут быть сделаны в выборе типа или значений фильтра.
Обратите внимание, что окно Диаграммы Боде имеет возможность построить график с учетом всех трех фильтров и ПИД-регулятора.
Для проверки передаточной функции одного фильтра, установите другие фильтры и PID: для ПИД-регулятора P = 1, I = 0, D = 0, а для рекурсивного фильтра B0 = 1, B1 = B2 = A1 = A2 = 0.
Ниже приведены примеры каждого из типов фильтров:
Фильтр низких частот 1-го порядка (Low Pass (1st order))
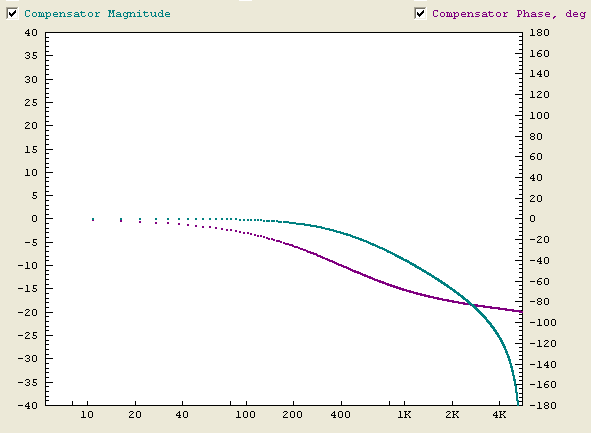
Низкочастотный фильтр обычно используется в следящей системе, чтобы уменьшить высокочастотный шум (или пики) на выходе. Фильтр также имеет желаемый эффект снижения коэффициента усиления на высоких частотах. Если усиление на высоких частотах усиление достигло 0 дБ, система может стать нестабильной. К сожалению, фильтр добавляет запаздывание фазы и из-за этого уменьшается запас по фазе. Низкочастотный фильтр 1-го порядка смещает фазу на 45 градусов и дает ослабление -3дБ на частоте среза. Частота среза обычно должна быть указано значительно больше, чем ширина полоса частот следящей системы, чтобы иметь небольшое отставание по фазе.
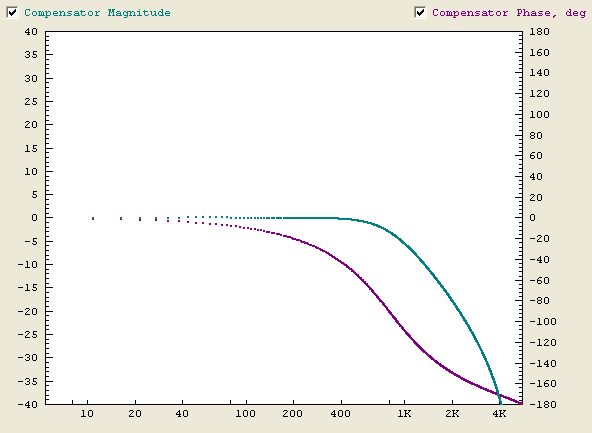
Фильтр низких частот 2-го порядка (Low Pass (2nd order))
Фильтр низких частот 2-го порядка обычно используется таким же образом, как фильтр нижних частот первого порядка, за исключением того, что он имеет более высокое ослабление,
чем фильтр нижних частот первого порядка.
К сожалению, это также приводит к допольнитому увеличению задержки фазы относительна фильтра нижних частот первого порядка.
В большинстве случаев частота среза для фильтра нижних частот второго порядка должна быть определена на более высокой частоте, чем фильтр 1-го порядка, для того,
чтобы иметь тот же фазовый сдвиг на частоте полосы пропускания системы. Тем не менее, фильтр нижних частот второго порядка, как правило, более предпочтителен,
поскольку он обеспечивает более высокое ослабление и «сглаживание» на выходе.
Фильтр низких частот 2-го содержит параметр Q, который меняет резкость фильтра.
Меньшее значение Q приводит к более резкой работе фильтра за счет "всплекса"(усиление увеличивается перед уменьшением). Значение 1,41 (так называемый фильтр Баттерворта), показанный ниже, является минимальным значением, которое может быть установленно без "всплеска".
Установив парметр Q в 0.7 явно виден "всплеск".
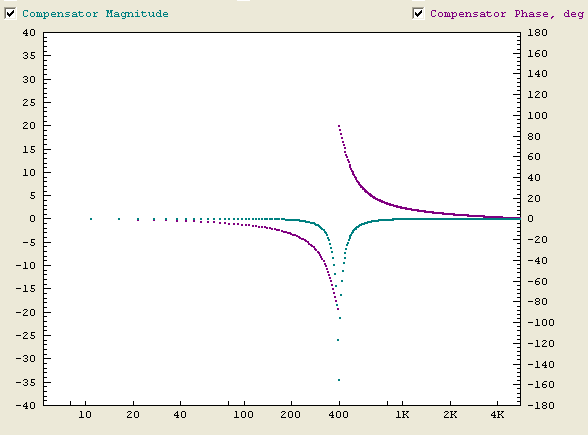
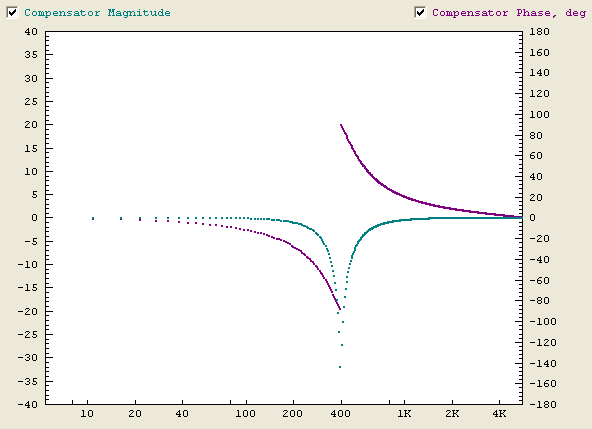
Узкополосный (режекторный) фильтр обычно используется в следящей системе при резких механических резонансах, которые могут сделать систему нестабильной.
Режекторный фильтр ослабляет очень локализованный диапазон частот. Он имеет коэффициент затухания (Damping), влияющий на резкость/ширину фильтра.
Недостатком использования режекторного фильтра является отставание по фазе, которое приводит к уменьшению запаса по фазе.
Фазовая задержка будет тем меньше, чем меньше значение Damping, а также от расстояния между частотой режекции и полосой пропускания системы.
Ниже приведены два узкополосных фильтра на частоте 400 Гц, один с затуханием 0,2, а другой с 0,4.
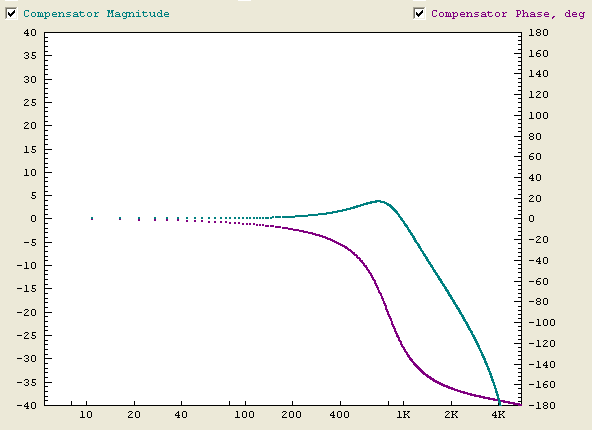
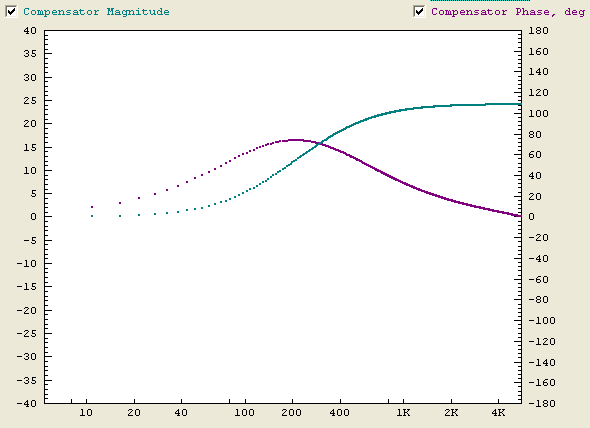
Pole-Zero фильтр обычно используется чтобы сдвинуть фазу на частоте 0 дБ системы с целью увеличения запаса по фазе. График показанный ниже имеет максимальную положительную фазу около 80 градусов при 200 Гц. Это достигается установкой N1, N2 в два раза ниже 200 Гц (100 Гц), и D1, D2 в 2 раза больше (400 Гц). Опережения-запаздывание фильтра (или компенсатора) часто могут быть использованы вместо производной усиления (на стадии настройки PID), и имеет значительное преимущество из-за более низкого усиления высоких частот. Если усиление на высоких частотах увеличилось до 0 дБ система может стать нестабильной.
Копирование C кода в буфер обмена
Нажатие этой кнопки копирует содержимое всех трех фильтров в буфер обмена, например для удобного переноса в С файл инициализации ЧПУ станка, смотрите так же раздел Окно ввода С программ (C Program Screen).
ch0->iir[0].B0=232.850006;
ch0->iir[0].B1=-450.471008;
ch0->iir[0].B2=217.869995;
ch0->iir[0].A1=1.001990;
ch0->iir[0].A2=-0.250994;
ch0->iir[1].B0=1.000000;
ch0->iir[1].B1=0.000000;
ch0->iir[1].B2=0.000000;
ch0->iir[1].A1=0.000000;
ch0->iir[1].A2=0.000000;
ch0->iir[2].B0=0.175291;
ch0->iir[2].B1=0.350583;
ch0->iir[2].B2=0.175291;
ch0->iir[2].A1=0.519908;
ch0->iir[2].A2=-0.221073;
Кнопка Download загружает фильтры в KMotion для выбранной оси вместе с параметрами и настройками.