great
thanks
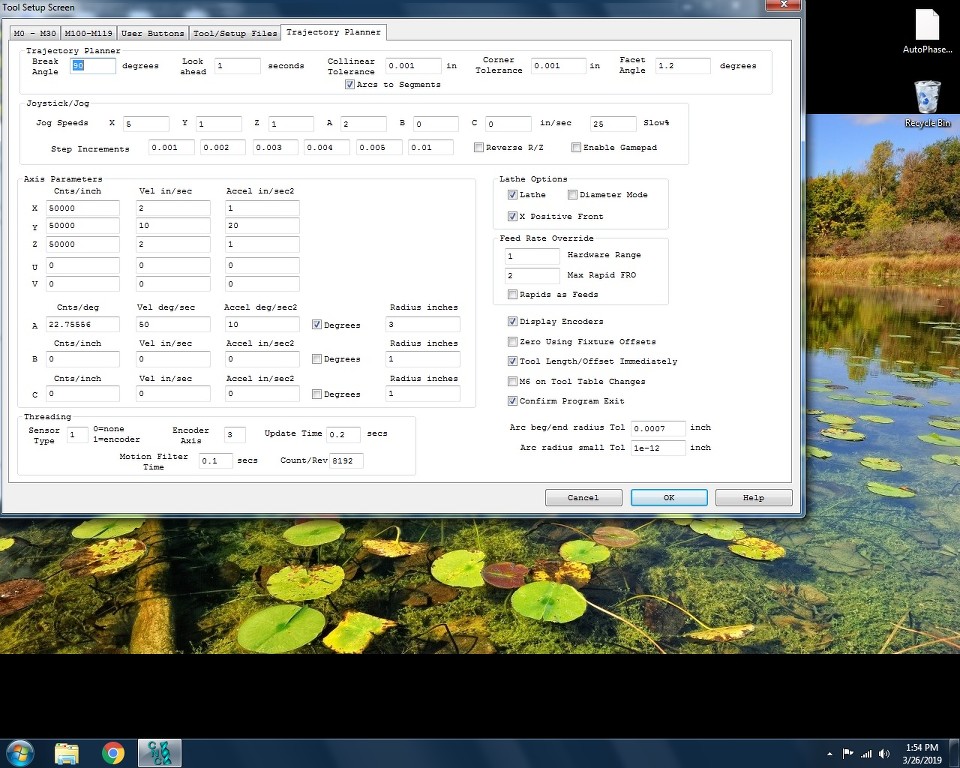
so i run the phase find and get some info on the A axis servo
2048 encoder 6 pole motor
should be 0.000366 right?
REPORT
------
0 Position = 8192 PhaseAngle = 3.520000
1 Position = 16384 PhaseAngle = 6.518000
2 Position = 16384 PhaseAngle = 6.404000
3 Position = 0 PhaseAngle = 0.382000
Counts per rev = 8192
Counts per cycle = 2732
Counts per cycle (rounded to 16)= 2736
invDistPerCycle (rounded)= 0.000365497076
Commutation offset = 1945
Input Gain Specified = -1.000
REPORT
------
0 Position = -2 PhaseAngle = 0.492000
1 Position = 8191 PhaseAngle = 3.519000
2 Position = 8191 PhaseAngle = 3.404000
3 Position = -1 PhaseAngle = 0.380000
Counts per rev = 8193
Counts per cycle = 2707
Counts per cycle (rounded to 16)= 2704
invDistPerCycle (rounded)= 0.000369822485
Commutation offset = 1924
Input Gain Specified = -1.000
REPORT
------
0 Position = 0 PhaseAngle = 0.491000
1 Position = 8192 PhaseAngle = 3.519000
2 Position = 8192 PhaseAngle = 3.404000
3 Position = -8192 PhaseAngle = -2.615000
Counts per rev = 8192
Counts per cycle = 2705
Counts per cycle (rounded to 16)= 2704
invDistPerCycle (rounded)= 0.000369822485
Commutation offset = 1924
Input Gain Specified = -1.000
REPORT
------
0 Position = 8192 PhaseAngle = 3.518000
1 Position = 16384 PhaseAngle = 6.519000
2 Position = 0 PhaseAngle = 0.382000
3 Position = -8192 PhaseAngle = -2.613000
Counts per rev = 8192
Counts per cycle = 2730
Counts per cycle (rounded to 16)= 2736
invDistPerCycle (rounded)= 0.000365497076
Commutation offset = 1917
Input Gain Specified = -1.000
REPORT
------
0 Position = 8192 PhaseAngle = 3.518000
1 Position = 16384 PhaseAngle = 6.519000
2 Position = 16384 PhaseAngle = 6.405000
3 Position = -1 PhaseAngle = 0.381000
Counts per rev = 8192
Counts per cycle = 2730
Counts per cycle (rounded to 16)= 2736
invDistPerCycle (rounded)= 0.000365497076
Commutation offset = 1948
Input Gain Specified = -1.000
Code: Select all
#include "KMotionDef.h"
// Drive a 3 Phase motor that has a Z index by
// 3 phase driving the coils (like a stepping motor)
// two revs each direction (two z pulses)
// monitor how many counts/cycle and counts/rev
// (including direction)and also determine the commutation
// offset by recording the phase angle at the index
// (which will be where zero is set) and offsetting by 1/4 of a cycle
//
// Set the following parameters according to your situation
// See the report generated on the Console Screen
#define DAC_CHAN 0 // which pair of PWM channels used
#define ENCODER_CHAN 1 // which encoder we are connected to
#define ENCODER_GAIN -1 // Set to -1 if desired to reverse axis direction
#define AMPLITUDE 100 // Set how hard to drive the coils pwm counts
#define Z_BIT_NUMBER 36 // What bit the Z index is connected to
#define AXIS_CHAN 0 // Axis channel to be used and configured
#define Ncycles 4 // don't change this
// x must be in the range 0->1 returns sin(x) and sin(x+120 degrees)
float Sine3PH (float x, float *sin2);
// put a voltage v on a 3 Phase motor at specified commutation angle
void Write3PH_DACs(CHAN *ch0, float v, double angle_in_cycles);
// return fractional part of a huge number accurately
float fractionf(double v);
void main()
{
float mid,k=0,dk=0.2,A=AMPLITUDE; // set coil current amplitude
int i,ignore=300,kpos[Ncycles],zmark,m=0;
double cnts_per_cycle,p0[Ncycles];
CHAN *ch = &chan[AXIS_CHAN];
// rotate until we find the index mark
ch->Enable=FALSE;
ch->InputMode=ENCODER_MODE;
ch->InputChan0=ENCODER_CHAN;
ch->OutputChan0=DAC_CHAN;
ch->OutputChan1=DAC_CHAN+1;
ch->OutputMode=NO_OUTPUT_MODE;
ch->InputGain0=ENCODER_GAIN;
for (;;)
{
WaitNextTimeSlice();
k+= dk;
Write3PH_DACs(ch,A, k/1000.0); // move the pole
zmark = ReadBit(Z_BIT_NUMBER);
if (!zmark && ignore>0) ignore--;
if (ignore==0 && zmark) // check for index mark
{
p0[m]=ch->Position; // save position
kpos[m]=k; // save phase angle
if (++m == Ncycles)
{
ch->Position=0; // set current position to Zero
break;
}
if (m==2) dk = -dk;
ignore=300;
}
}
Write3PH_DACs(ch,0,0); // turn off the coil
printf("\nREPORT\n------\n");
for (i=0; i<Ncycles; i++)
printf("%d Position = %6.0f PhaseAngle = %f\n",i,p0[i],kpos[i]/1000.0);
printf("Counts per rev = %6.0f\n",p0[1]-p0[0]);
cnts_per_cycle = (p0[1]-p0[0])/(kpos[1]-kpos[0])*1000.0;
printf("Counts per cycle = %6.0f\n",cnts_per_cycle);
// round to 16
if (cnts_per_cycle>0)
cnts_per_cycle = ((int)(cnts_per_cycle/16.0 + 0.5))*16.0;
else
cnts_per_cycle = ((int)(cnts_per_cycle/16.0 - 0.5))*16.0;
printf("Counts per cycle (rounded to 16)= %6.0f\n",cnts_per_cycle);
ch->invDistPerCycle = 1.0/cnts_per_cycle;
printf("invDistPerCycle (rounded)= %15.12f\n",ch->invDistPerCycle);
mid = (kpos[2]+kpos[1])/2000.0;
mid = mid - (int)mid;
ch->CommutationOffset = mid*cnts_per_cycle + 0.25*fast_fabs(cnts_per_cycle);
printf("Commutation offset = %6.0f\n",ch->CommutationOffset);
printf("Input Gain Specified = %6.3f\n",ch->InputGain0);
}
// put a voltage v on a 3 Phase motor at specified commutation angle
void Write3PH_DACs(CHAN *ch, float v, double angle_in_cycles)
{
float theta,sin1f;
if (angle_in_cycles<0)
theta = 1.0f-fractionf(-angle_in_cycles);
else
theta = fractionf(angle_in_cycles);
DAC(ch->OutputChan0, (int)(v * Sine3PH(theta,&sin1f)));
DAC(ch->OutputChan1, (int)(v * sin1f));
}
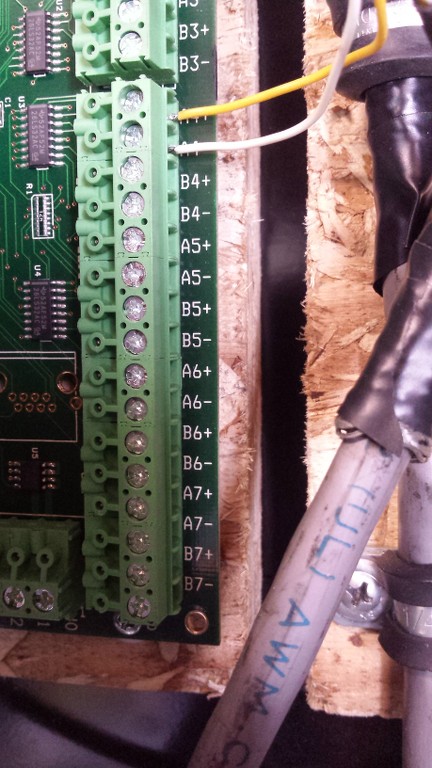
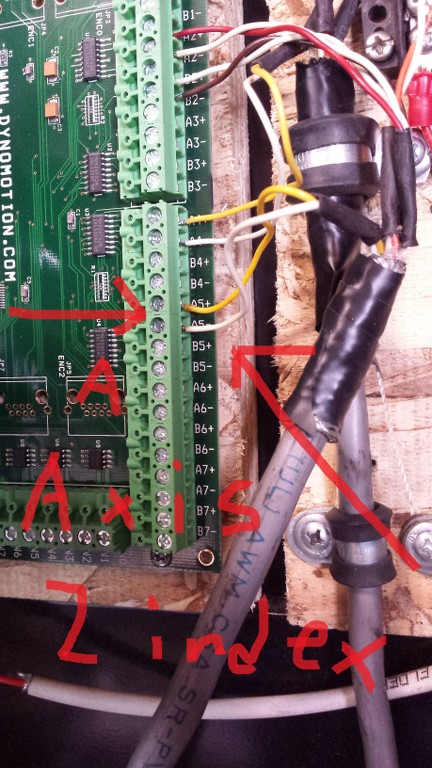
i do not know why but i cant get a Z index to work on any bits but 36
40, 44 and 48 should be Z+ right? followed by Z-