all my hard work building the old machines

anyways new machine to build and new questions!!!

i got my sharnoa started now
i got the panel wired up some and run into my first issues

1 the Y axis encoder slowly runs off forever. right when i wired it up it was fine. not sure what changed?
Code: Select all
#include "KMotionDef.h"
main()
{
ch0->InputMode=ENCODER_MODE;
ch0->OutputMode=DAC_SERVO_MODE;
ch0->Vel=40000;
ch0->Accel=400000;
ch0->Jerk=4e+06;
ch0->P=0;
ch0->I=0.01;
ch0->D=0;
ch0->FFAccel=0;
ch0->FFVel=0;
ch0->MaxI=200;
ch0->MaxErr=1e+06;
ch0->MaxOutput=200;
ch0->DeadBandGain=1;
ch0->DeadBandRange=0;
ch0->InputChan0=0;
ch0->InputChan1=0;
ch0->OutputChan0=0;
ch0->OutputChan1=0;
ch0->MasterAxis=-1;
ch0->LimitSwitchOptions=0x12f;
ch0->LimitSwitchNegBit=136;
ch0->LimitSwitchPosBit=137;
ch0->SoftLimitPos=1e+09;
ch0->SoftLimitNeg=-1e+09;
ch0->InputGain0=1;
ch0->InputGain1=1;
ch0->InputOffset0=0;
ch0->InputOffset1=0;
ch0->OutputGain=1;
ch0->OutputOffset=0;
ch0->SlaveGain=1;
ch0->BacklashMode=BACKLASH_OFF;
ch0->BacklashAmount=0;
ch0->BacklashRate=0;
ch0->invDistPerCycle=1;
ch0->Lead=0;
ch0->MaxFollowingError=1000000000;
ch0->StepperAmplitude=20;
ch0->iir[0].B0=1;
ch0->iir[0].B1=0;
ch0->iir[0].B2=0;
ch0->iir[0].A1=0;
ch0->iir[0].A2=0;
ch0->iir[1].B0=1;
ch0->iir[1].B1=0;
ch0->iir[1].B2=0;
ch0->iir[1].A1=0;
ch0->iir[1].A2=0;
ch0->iir[2].B0=0.000768788;
ch0->iir[2].B1=0.00153758;
ch0->iir[2].B2=0.000768788;
ch0->iir[2].A1=1.92076;
ch0->iir[2].A2=-0.923833;
EnableAxis(0);
ch1->InputMode=ENCODER_MODE;
ch1->OutputMode=DAC_SERVO_MODE;
ch1->Vel=40000;
ch1->Accel=400000;
ch1->Jerk=4e+06;
ch1->P=0;
ch1->I=0.01;
ch1->D=0;
ch1->FFAccel=0;
ch1->FFVel=0;
ch1->MaxI=200;
ch1->MaxErr=1e+06;
ch1->MaxOutput=200;
ch1->DeadBandGain=1;
ch1->DeadBandRange=0;
ch1->InputChan0=1;
ch1->InputChan1=0;
ch1->OutputChan0=1;
ch1->OutputChan1=0;
ch1->MasterAxis=-1;
ch1->LimitSwitchOptions=0x12f;
ch1->LimitSwitchNegBit=138;
ch1->LimitSwitchPosBit=139;
ch1->SoftLimitPos=1e+09;
ch1->SoftLimitNeg=-1e+09;
ch1->InputGain0=1;
ch1->InputGain1=1;
ch1->InputOffset0=0;
ch1->InputOffset1=0;
ch1->OutputGain=1;
ch1->OutputOffset=0;
ch1->SlaveGain=1;
ch1->BacklashMode=BACKLASH_OFF;
ch1->BacklashAmount=0;
ch1->BacklashRate=0;
ch1->invDistPerCycle=1;
ch1->Lead=0;
ch1->MaxFollowingError=1000000000;
ch1->StepperAmplitude=20;
ch1->iir[0].B0=1;
ch1->iir[0].B1=0;
ch1->iir[0].B2=0;
ch1->iir[0].A1=0;
ch1->iir[0].A2=0;
ch1->iir[1].B0=1;
ch1->iir[1].B1=0;
ch1->iir[1].B2=0;
ch1->iir[1].A1=0;
ch1->iir[1].A2=0;
ch1->iir[2].B0=0.000769;
ch1->iir[2].B1=0.001538;
ch1->iir[2].B2=0.000769;
ch1->iir[2].A1=1.92081;
ch1->iir[2].A2=-0.923885;
EnableAxis(1);
ch2->InputMode=ENCODER_MODE;
ch2->OutputMode=DAC_SERVO_MODE;
ch2->Vel=40000;
ch2->Accel=400000;
ch2->Jerk=4e+06;
ch2->P=0;
ch2->I=0.01;
ch2->D=0;
ch2->FFAccel=0;
ch2->FFVel=0;
ch2->MaxI=200;
ch2->MaxErr=1e+06;
ch2->MaxOutput=200;
ch2->DeadBandGain=1;
ch2->DeadBandRange=0;
ch2->InputChan0=2;
ch2->InputChan1=0;
ch2->OutputChan0=2;
ch2->OutputChan1=0;
ch2->MasterAxis=-1;
ch2->LimitSwitchOptions=0x12f;
ch2->LimitSwitchNegBit=140;
ch2->LimitSwitchPosBit=141;
ch2->SoftLimitPos=1e+09;
ch2->SoftLimitNeg=-1e+09;
ch2->InputGain0=1;
ch2->InputGain1=1;
ch2->InputOffset0=0;
ch2->InputOffset1=0;
ch2->OutputGain=1;
ch2->OutputOffset=0;
ch2->SlaveGain=1;
ch2->BacklashMode=BACKLASH_OFF;
ch2->BacklashAmount=0;
ch2->BacklashRate=0;
ch2->invDistPerCycle=1;
ch2->Lead=0;
ch2->MaxFollowingError=1000000000;
ch2->StepperAmplitude=20;
ch2->iir[0].B0=1;
ch2->iir[0].B1=0;
ch2->iir[0].B2=0;
ch2->iir[0].A1=0;
ch2->iir[0].A2=0;
ch2->iir[1].B0=1;
ch2->iir[1].B1=0;
ch2->iir[1].B2=0;
ch2->iir[1].A1=0;
ch2->iir[1].A2=0;
ch2->iir[2].B0=0.000769;
ch2->iir[2].B1=0.001538;
ch2->iir[2].B2=0.000769;
ch2->iir[2].A1=1.92081;
ch2->iir[2].A2=-0.923885;
EnableAxis(2);
DefineCoordSystem(0,1,2,-1);
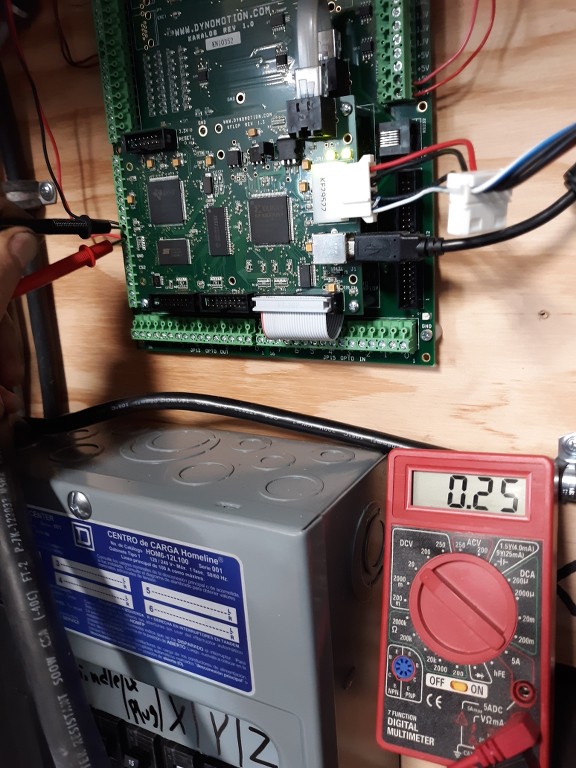
}the analog 10v (DAC7) does not reflect the volts that the analog status is showing. 10V on status and .25v on multimeter DAC7?
VFD reads true on the .25v.....
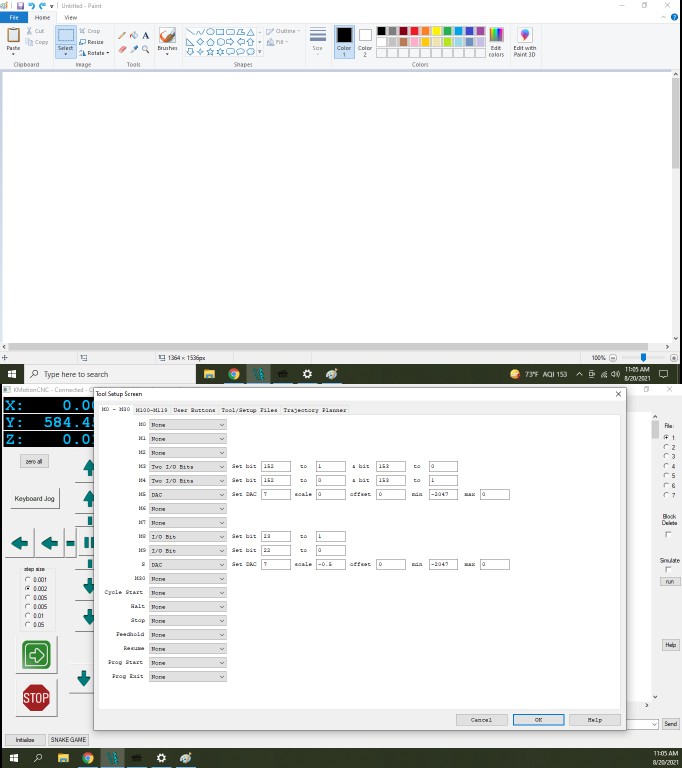
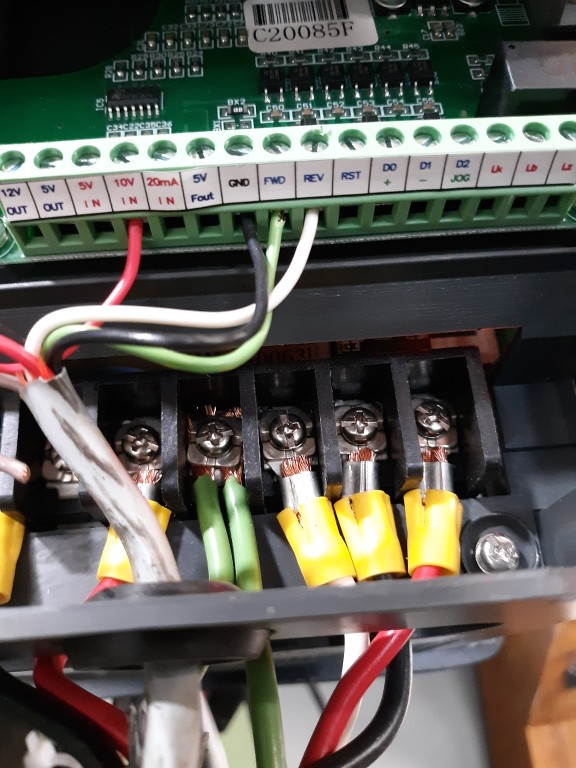
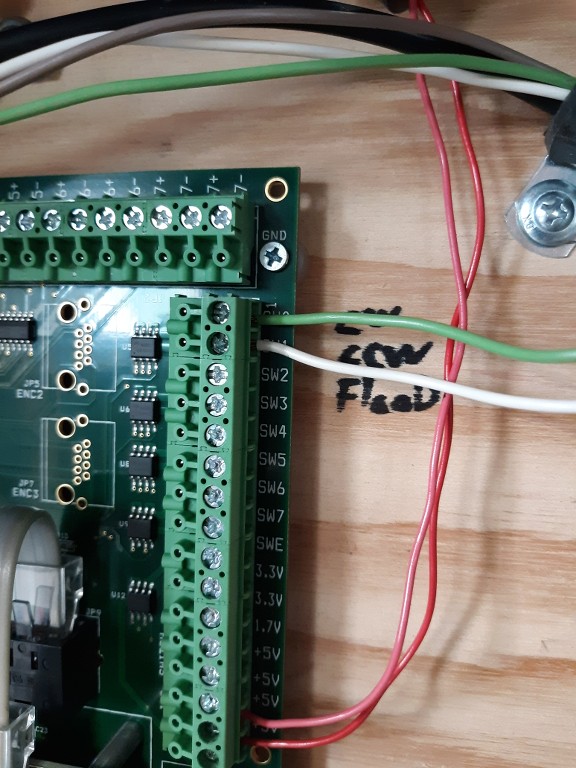
3 spindle rotation. FET 0 and 1 toggle fine for the CW and CCW on the digital I/O screen. the VFD does not accept the commands though. i set the
parameters on the VFD for 0-10 external command. i multimetered the FET pins and they dont ground the 5V pins below it when
toggled.