destroyed shop and new builds.
Posted: Fri Aug 20, 2021 6:01 pm
last September a wild fire burned mine and like 3000 other homes and buildings to the ground.

all my hard work building the old machines

anyways new machine to build and new questions!!!

i got my sharnoa started now
i got the panel wired up some and run into my first issues

1 the Y axis encoder slowly runs off forever. right when i wired it up it was fine. not sure what changed?
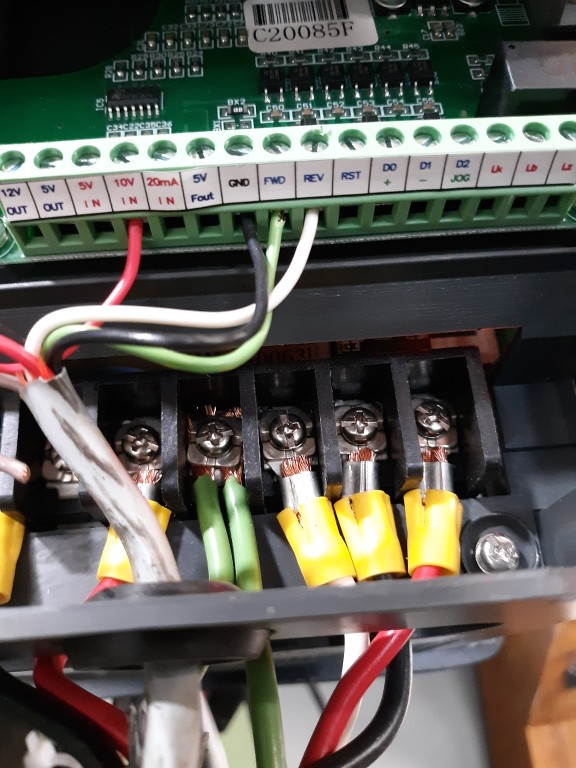
2 spindle settings. i got the simple version started for the m3 m4 and m5. S command looks good.
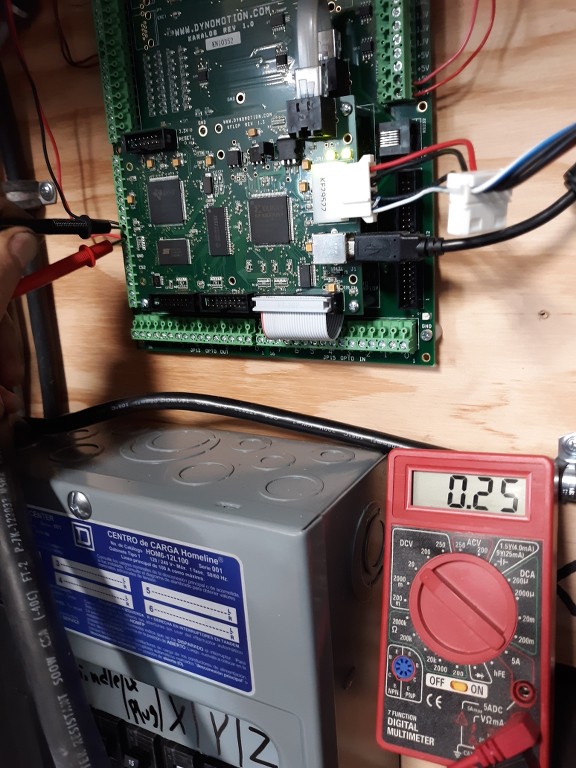
the analog 10v (DAC7) does not reflect the volts that the analog status is showing. 10V on status and .25v on multimeter DAC7?
VFD reads true on the .25v.....
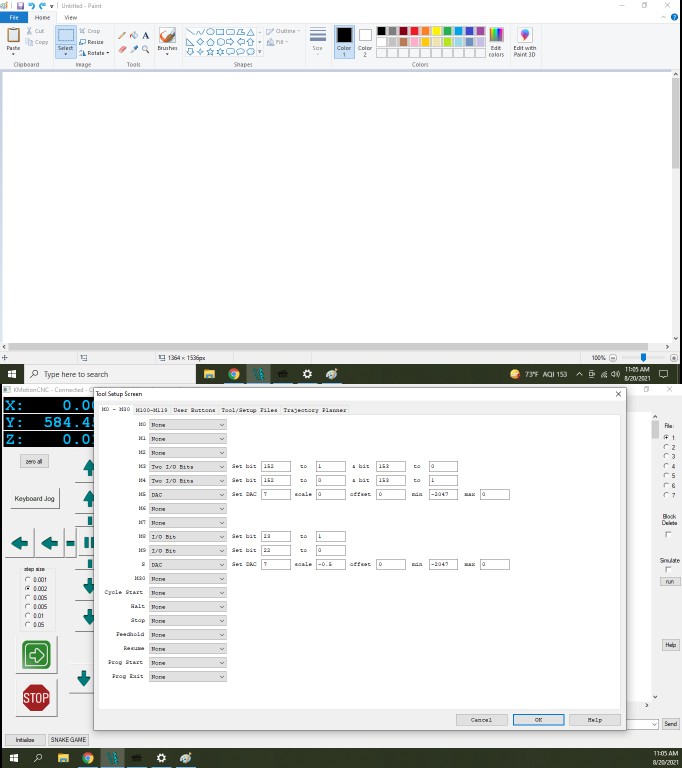
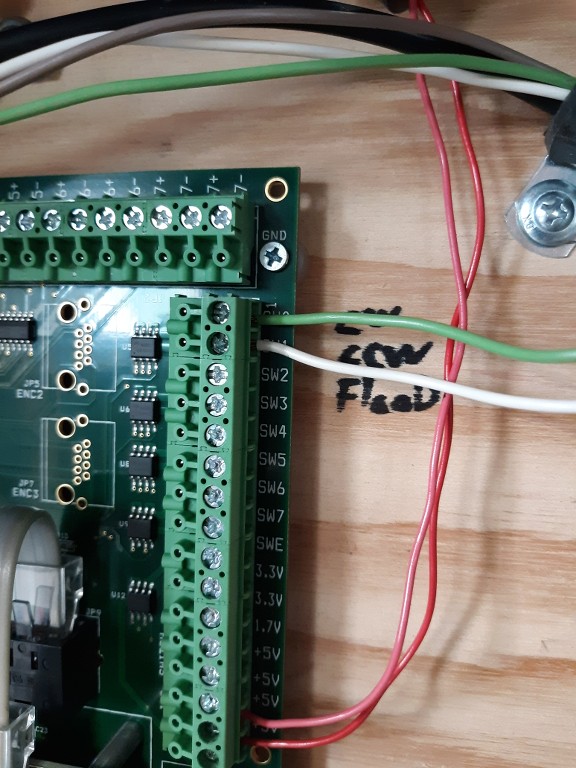
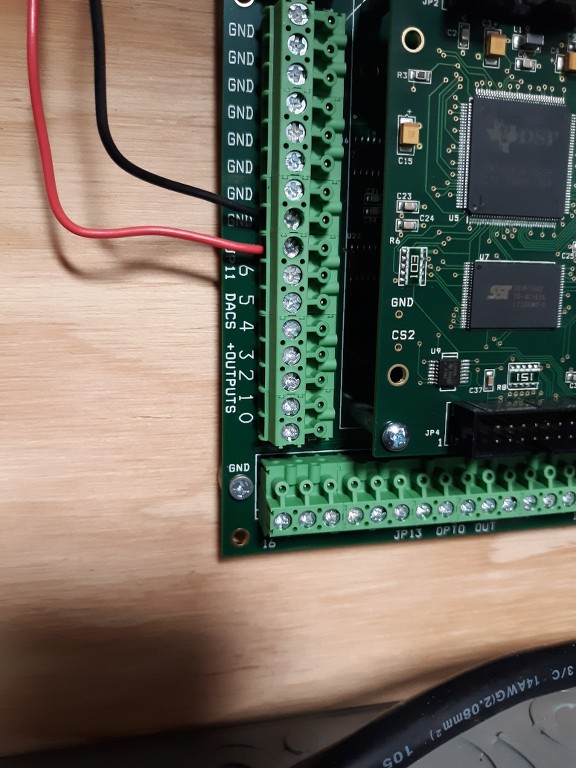
3 spindle rotation. FET 0 and 1 toggle fine for the CW and CCW on the digital I/O screen. the VFD does not accept the commands though. i set the
parameters on the VFD for 0-10 external command. i multimetered the FET pins and they dont ground the 5V pins below it when
toggled.
all my hard work building the old machines
anyways new machine to build and new questions!!!
i got my sharnoa started now
i got the panel wired up some and run into my first issues
1 the Y axis encoder slowly runs off forever. right when i wired it up it was fine. not sure what changed?
Code: Select all
#include "KMotionDef.h"
main()
{
ch0->InputMode=ENCODER_MODE;
ch0->OutputMode=DAC_SERVO_MODE;
ch0->Vel=40000;
ch0->Accel=400000;
ch0->Jerk=4e+06;
ch0->P=0;
ch0->I=0.01;
ch0->D=0;
ch0->FFAccel=0;
ch0->FFVel=0;
ch0->MaxI=200;
ch0->MaxErr=1e+06;
ch0->MaxOutput=200;
ch0->DeadBandGain=1;
ch0->DeadBandRange=0;
ch0->InputChan0=0;
ch0->InputChan1=0;
ch0->OutputChan0=0;
ch0->OutputChan1=0;
ch0->MasterAxis=-1;
ch0->LimitSwitchOptions=0x12f;
ch0->LimitSwitchNegBit=136;
ch0->LimitSwitchPosBit=137;
ch0->SoftLimitPos=1e+09;
ch0->SoftLimitNeg=-1e+09;
ch0->InputGain0=1;
ch0->InputGain1=1;
ch0->InputOffset0=0;
ch0->InputOffset1=0;
ch0->OutputGain=1;
ch0->OutputOffset=0;
ch0->SlaveGain=1;
ch0->BacklashMode=BACKLASH_OFF;
ch0->BacklashAmount=0;
ch0->BacklashRate=0;
ch0->invDistPerCycle=1;
ch0->Lead=0;
ch0->MaxFollowingError=1000000000;
ch0->StepperAmplitude=20;
ch0->iir[0].B0=1;
ch0->iir[0].B1=0;
ch0->iir[0].B2=0;
ch0->iir[0].A1=0;
ch0->iir[0].A2=0;
ch0->iir[1].B0=1;
ch0->iir[1].B1=0;
ch0->iir[1].B2=0;
ch0->iir[1].A1=0;
ch0->iir[1].A2=0;
ch0->iir[2].B0=0.000768788;
ch0->iir[2].B1=0.00153758;
ch0->iir[2].B2=0.000768788;
ch0->iir[2].A1=1.92076;
ch0->iir[2].A2=-0.923833;
EnableAxis(0);
ch1->InputMode=ENCODER_MODE;
ch1->OutputMode=DAC_SERVO_MODE;
ch1->Vel=40000;
ch1->Accel=400000;
ch1->Jerk=4e+06;
ch1->P=0;
ch1->I=0.01;
ch1->D=0;
ch1->FFAccel=0;
ch1->FFVel=0;
ch1->MaxI=200;
ch1->MaxErr=1e+06;
ch1->MaxOutput=200;
ch1->DeadBandGain=1;
ch1->DeadBandRange=0;
ch1->InputChan0=1;
ch1->InputChan1=0;
ch1->OutputChan0=1;
ch1->OutputChan1=0;
ch1->MasterAxis=-1;
ch1->LimitSwitchOptions=0x12f;
ch1->LimitSwitchNegBit=138;
ch1->LimitSwitchPosBit=139;
ch1->SoftLimitPos=1e+09;
ch1->SoftLimitNeg=-1e+09;
ch1->InputGain0=1;
ch1->InputGain1=1;
ch1->InputOffset0=0;
ch1->InputOffset1=0;
ch1->OutputGain=1;
ch1->OutputOffset=0;
ch1->SlaveGain=1;
ch1->BacklashMode=BACKLASH_OFF;
ch1->BacklashAmount=0;
ch1->BacklashRate=0;
ch1->invDistPerCycle=1;
ch1->Lead=0;
ch1->MaxFollowingError=1000000000;
ch1->StepperAmplitude=20;
ch1->iir[0].B0=1;
ch1->iir[0].B1=0;
ch1->iir[0].B2=0;
ch1->iir[0].A1=0;
ch1->iir[0].A2=0;
ch1->iir[1].B0=1;
ch1->iir[1].B1=0;
ch1->iir[1].B2=0;
ch1->iir[1].A1=0;
ch1->iir[1].A2=0;
ch1->iir[2].B0=0.000769;
ch1->iir[2].B1=0.001538;
ch1->iir[2].B2=0.000769;
ch1->iir[2].A1=1.92081;
ch1->iir[2].A2=-0.923885;
EnableAxis(1);
ch2->InputMode=ENCODER_MODE;
ch2->OutputMode=DAC_SERVO_MODE;
ch2->Vel=40000;
ch2->Accel=400000;
ch2->Jerk=4e+06;
ch2->P=0;
ch2->I=0.01;
ch2->D=0;
ch2->FFAccel=0;
ch2->FFVel=0;
ch2->MaxI=200;
ch2->MaxErr=1e+06;
ch2->MaxOutput=200;
ch2->DeadBandGain=1;
ch2->DeadBandRange=0;
ch2->InputChan0=2;
ch2->InputChan1=0;
ch2->OutputChan0=2;
ch2->OutputChan1=0;
ch2->MasterAxis=-1;
ch2->LimitSwitchOptions=0x12f;
ch2->LimitSwitchNegBit=140;
ch2->LimitSwitchPosBit=141;
ch2->SoftLimitPos=1e+09;
ch2->SoftLimitNeg=-1e+09;
ch2->InputGain0=1;
ch2->InputGain1=1;
ch2->InputOffset0=0;
ch2->InputOffset1=0;
ch2->OutputGain=1;
ch2->OutputOffset=0;
ch2->SlaveGain=1;
ch2->BacklashMode=BACKLASH_OFF;
ch2->BacklashAmount=0;
ch2->BacklashRate=0;
ch2->invDistPerCycle=1;
ch2->Lead=0;
ch2->MaxFollowingError=1000000000;
ch2->StepperAmplitude=20;
ch2->iir[0].B0=1;
ch2->iir[0].B1=0;
ch2->iir[0].B2=0;
ch2->iir[0].A1=0;
ch2->iir[0].A2=0;
ch2->iir[1].B0=1;
ch2->iir[1].B1=0;
ch2->iir[1].B2=0;
ch2->iir[1].A1=0;
ch2->iir[1].A2=0;
ch2->iir[2].B0=0.000769;
ch2->iir[2].B1=0.001538;
ch2->iir[2].B2=0.000769;
ch2->iir[2].A1=1.92081;
ch2->iir[2].A2=-0.923885;
EnableAxis(2);
DefineCoordSystem(0,1,2,-1);
}the analog 10v (DAC7) does not reflect the volts that the analog status is showing. 10V on status and .25v on multimeter DAC7?
VFD reads true on the .25v.....
3 spindle rotation. FET 0 and 1 toggle fine for the CW and CCW on the digital I/O screen. the VFD does not accept the commands though. i set the
parameters on the VFD for 0-10 external command. i multimetered the FET pins and they dont ground the 5V pins below it when
toggled.